GD&T Workshop: DRF Establishment Process Refinements




In my June and July columns I dealt with careful definitions of the many important concepts associated with the coordinate systems that we use to control the orientations and locations of the features of machine parts. In the August column I set forth the most important rules for managing Datum Feature Simulators and for establishing Datum Reference Frames. Given the fact that GD&T is a symbolic language with which to research, refine and ultimately “encode” the functions of each feature of a machine part, the tools for defining Datum Reference Frames had better be able to represent those functions clearly or we are in trouble. The ability to do so was reasonably sophisticated based on the ASME Y14.5M 1994 Standard, but has been refined and improved by the 2009 Standard which provides the following new tools:
Application of the TZM Modifiers (S), (M) and (L) to Planar Datum Features
The Degrees of Constraint Modifiers [u,v,w,x,y,z]
The Datum Feature Simulator Translation Modifier x
The Movable Datum Target Modifier
Let’s take a detailed look at them.
1. Application of the Tolerance Zone Mobility (Material Boundary) Modifiers (S), (M) and (L) to Planar Datum Features. (Note: We continue to use the modifier (S) explicitly, even though it is illegal, because of the clarity it enables.)
Until the advent of the Y14.5 2009 Standard, TZM (Tolerance Zone Mobility) modifiers could never be applied to planar surfaces, making it impossible to address a common, but generally unrecognized problem represented by the situation in Figure 1. Based on the Y14.5 2009 enhancements found in paragraphs 4.16.3 and 4.16.4 on p.71, there are now a variety of different ways in which to specify the behavior of the simulator for a location constrained planar Datum Feature like C, and insights into how they impact the resulting DRF[A,B,C].
To set the stage, Datum Feature A is a planar surface which serves to constrain pitch, yaw and one degree of translational freedom, Datum Feature B is a bore which serves to constrain two more degrees of translational freedom, and Datum Feature C is a planar surface which serves to constrain roll. Because Datum Feature C is location constrained relative to Datum B, C has a Virtual Maximum (50.25) and a Virtual Least (49.75) Material Boundary. If simulator C were fixed at the Virtual MMB, any departure of C from the MM boundary would result in residual DRF roll. If simulator C were fixed at the Virtual LMB, any departure of C from the LM boundary would also result in residual roll. Finally, if simulator C were forced to slide toward and remain in contact with C, it would stabilize DRF roll regardless of the location of C. Given these three alternative possibilities, it is obviously necessary to understand the functional objective of Datum Feature C in each particular instance, and to then encode it somehow. This is where the modifiers (M), (L) and (S) come into action—as now authorized by the 2009 Standard—of which the alternatives (M) and (S) are illustrated in Figure 1.
Note the Rule of TZM Modifier Applicability: TZM modifiers may be used with every Datum Feature type except planar Datum Features which are not location constrained relative to higher precedence Datum Features.
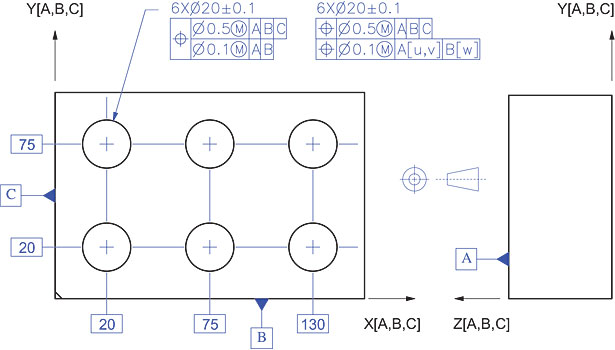
2. The Degrees of Constraint Modifiers [u,v,w,x,y,z] serve to Customize the DRF Establishment Process and eliminate dependence on Composite Feature Control Frames.
The “Can-May-Must Rule” set forth in our August column states that if a Datum Feature is able to constrain a particular degree of freedom, and is also permitted to do so, then it must. This rule, however, can be overridden by listing Datum Features in the second and any lower tiers of a Composite Feature Control Frame, where they may only constrain rotational degrees of freedom. Since almost no one knows this rule of Composite Feature Control Frames, it might be nice to be able to specify requirements like this explicitly. The newly available Degrees of Constraint modifiers [u,v,w,x,y,z] are just the ticket (Y14.5 2009 §4.22+4.23 pp.81-83).
In Figure 2, the second tier of the Composite Feature Control Frame lists planar Datum Feature A, which is only permitted to constrain pitch and yaw, and Datum Feature B, which is only permitted to constrain roll, but almost no one knows this. On the other hand, the second tier of the compound Feature Control Frame states these requirements explicitly, making a huge contribution to the clarity of the imposed requirements. However, as soon as we use any of these modifiers, because they are absolutely explicit, we need to identify the X, Y and Z axes of the specified DRF explicitly as well, and remember that “u” refers to rotation about X, “v” to rotation about Y, and “w” to rotation about Z. Furthermore, we need to know and respect the Rules of Degrees of Constraint Modifier Management in order to apply the modifiers in a truly functional manner.
3. The Datum Feature Simulator Translation Modifier x serves to refine certain DRF establishment processes.
Under some very unique conditions represented by the drawing in Figure 3, we can turn a “clocking” Datum Feature into an “aligning” Datum Feature using the Y14.5 2009 Standard introduced Translation modifier x (Y14.5 2009 §4.11.10 p.63). Per the Rules of Datum Feature Simulator Location Control set forth in our August column, barring any notes to the contrary, all Datum Feature Simulators must be fixed in location at the Basic locations of their associated Datum Features. In the absence of any note to the contrary, the mid-plane of the slab-like simulator for Datum Feature C defined by Feature Control Frame (1) in Figure 3 must be fixed in location 18 millimeters from the Z axis of DRF ABC. Furthermore, under the influence of the TZM modifier (S), the simulator must expand to consume all the available space inside the slot and achieve roll stability. In this case the orientation of Datum Feature C has no impact, and it is only its location which is responsible for constraining roll. If, however, we continue to reference Datum Feature C RMB but add the Translation modifier x as shown in Feature Control Frame (2), the simulator for C will now be free to translate toward or away from the axis of B as it expands even more, now making the orientation of C responsible for constraining roll, as shown in alternative two in Figure 3.
Note: In order to use the Translation modifier correctly, it is necessary to be aware of the Rule of Translation Modifier Applicability, namely, it only applies to Datum Features of size and only when they are referenced RMB.
4. The Movable Datum Target modifier serves to refine the Datum Target based DRF establishment process.
As shown in Figure 4, the “beaks” on the labels for spherical Datum Target Simulators C1 and C2 make clear that the simulators are required to slide to the left during the DRF establishment process to stably constrain the last degree of translational DRF freedom in Y. In the absence of the beaks, the simulators would be required to be fixed at their indicated basic locations in X and Y, leading to potential failure to accommodate the actual part or to failure to impose a stable Datum Reference Frame.
The Next Workshop
With a relatively complete set of concepts, tools, rules and processes for Datum Reference Frame establishment in hand, our next workshop will be dedicated to best practices for Datum Feature selection and for their sequencing in Feature Control Frames, namely in keeping with the fundamental concept that the purpose of GD&T is to “encode” part feature functions and is therefore only valuable if the specified Datum Features are actually capable of performing their duties and are properly sequenced in Feature Control Frames.
And if you have any questions or feedback, let ‘em rip.
Bill Tandler is the president and chief technical officer of Multi Metrics Inc. (Menlo Park, CA). He can be reached at GDandTWorkshop@qualitymag.com or (650) 328-0200.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!