White Light for Machine Vision Applications
“WHITE” LIGHT IS LIGHT THAT CONTAINS A MIXTURE OF WAVELENGTHS FROM A WIDE RANGE OF THE VISIBLE LIGHT SPECTRUM.


Most color machine vision applications illuminate an object with a white light source. Depending on the color, the object “reflects” (scatters) differing amounts of different wavelengths, and absorbs others. The camera then measures the amount of reddish, greenish and bluish wavelengths that are present in the reflected light from each point on the object.
Loosely speaking, “white” light is light that contains a mixture of wavelengths from a wide range of the visible light spectrum. But if we try to get more precise than that, we learn that there is no single answer to the question of “what color is that object?” or “what exactly does white color mean?” because this definition of “color” is a human perception. A person’s perception of color is affected by many things such as the color of the room that they were recently in, or ways that their brain manipulated color shades. More importantly here, there are many different combinations of wavelengths of light that may appear to be the same “white” to a person and so human perception of the “color” of white light is not enough to determine suitability for the application.
In nature, and filament type light bulbs, most light is created by a surface that glows after it has been heated to thousands of degrees. The emitted light is a mixture of many different wavelengths of light. A graph of the amount of light vs. wavelength will look like a smooth “hump” with no notches (missing frequencies).(See figure 1.) As the temperature of the surface varies, the location of the “hump” on the scale moves. If the temperature is “only” a few thousand degrees Centigrade, as in a filament light bulb, the hump is centered more towards the longer (redder) wavelength end of the spectrum and the white light appears slightly reddish (“warm”).
If the surface is at a higher temperature of around 5,700 degrees Kelvin, like the surface of the sun, the hump is centered near the center of the visible spectrum and the light appears to be a “pure” white. This general “shade” of white light is called the color temperature. The emitting body is often called a “black body,” named for the idealized color of the object (black) which makes the emission equations the simplest. Filament type lights, even when pushed to the highest filament survival temperature are skewed towards the redder end of the spectrum. Historic light sources had a nice smooth spectrum with no “gaps,” but a lower color temperature. Since sunlight is often considered to be the “gold standard,” higher color temperatures became associated with light good for color rendition.
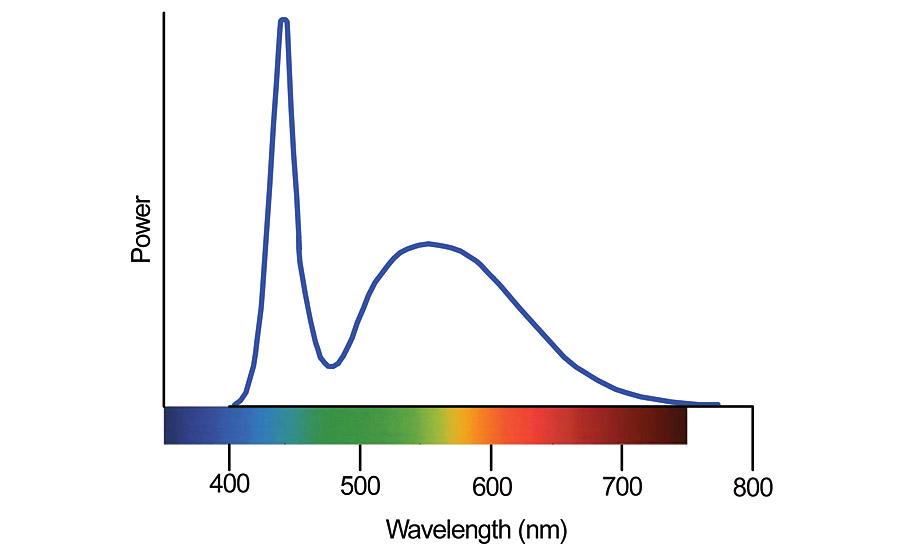
Newer types of light sources, such as LEDs, create light by non-thermal means and have many advantages over incandescent light sources. One disadvantage is that their spectrums are usually not as “smooth.” (See figure 2.) Also, they technically have an equivalent correlated color temperature, not a color temperature, but they can easily provide higher equivalent color temperatures. Let’s explore their suitability by dividing color machine vision applications into three levels regarding the quality and control of spectral content of the light sources.
The simplest application level is fortunately also the most common. This group of applications uses color imaging to differentiate between significantly different colors. One common case within this group is to differentiate features, for example, to read red lettering on a green product. If the lightness of the red and green are the same, gray scale imaging will not “see” or differentiate the lettering, while color imaging will. Another common case is to verify correct assembly. For example, to make sure that a red gas cap door (and not a green one) was put on a red automobile. As long as the alternate colors are all very different, the spectral content of nearly any white light source will be suitable for these applications. If a portion of the perceived color is from fluorescing (e.g. with “day-glo” type colors or fabrics with whiteners) UV content must be included in the light source.
The next level is where subtle differences in colors must be detected. One example is to detect when the shade of a product being produced is drifting off. Another might be to determine attributes of or differentiate agricultural products via shades of colors. For these types of applications, a relatively full and smooth spectrum of light is required. Expert help for such applications is the safest bet, but a suitable spectrum can often be had by looking at two usually-available specifications. The first is to look for a higher correlated color temperature (such as 5,000 K) to assure sufficient spectral content in the shorter wavelength end of the spectrum. The other is to look for a CRI (Color Rendering Index) of 92 or higher. CRI is a reasonably good, but not ideal indicator of the smoothness and completeness of the spectrum for a given correlated color temperature.
The most stringent group of applications are those that require measuring color to specified objective external standards. An example would be consumer products where the shades of products from different sources must match. Machine vision is used on these applications to obtain imaging-based capabilities that are not available with single-point sensors. Most such standards seek to provide device-independent results and to emulate human perception. In these cases, more in-depth engineering work is required to learn the requirements of the standard, and select a light source that is compliant, stable, and also meets the other non-spectral requirements of the application.
For brevity most statements in this article are written to cover only common cases and the main concepts. These topics are covered in greater precision in our lighting courses and when we provide lighting solution engineering services.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!